Hoy comenzamos a analizar las dos primeras leyes de la robótica de Isaac Asimov que hemos incluido en la XXIX Práctica de Sintaxis.
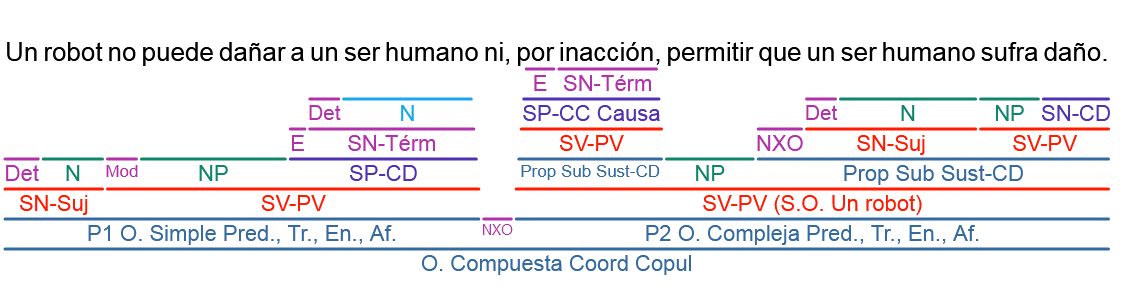
3. Un robot no puede dañar a un ser humano ni, por inacción, permitir que un ser humano sufra daño. (1ª Ley de la Robótica)

Solución:
- Es una oración compuesta por coordinación copulativa en la que se unen dos oraciones mediante la conjunción «ni».
- P1 es una oración simple que no tiene mucha dificultad. «Poder dañar» es una perífrasis y «ser humano» una locuciión.
- P2 es una oración compleja predicativa con el sujeto omitido (un robot). El complemento «por inacción» al ir delante de «permitir» os puede hacer caer en el error de que va a su nivel, pero en realidad va dentro de la proposición subordinada sustantiva que funciona como CD. El ser humano sufre daño por la inacción. Es la causa de sufrir, no de permitir.
4. Un robot debe obedecer las órdenes dadas por los seres humanos excepto cuando tales órdenes entren en conflicto con la Primera Ley. (2ª Ley de la Robótica)
 Solución:
Solución:
- Es una oración compleja, predicativa y transitiva.
- Dentro del C tenemos una subordinada adjetiva que complementa a órdenes (las órdenes que son dadas por…)
- El «excepto cuando» equivale a una condición «siempre que no…» y funciona como complemento oracional. «Entrar en conflicto» es el NP y exige un C. Rég.
algunos seres humanos temen profundamente la soledad